多自由度梯度磁场控制系统相关应用文献(2017-2022)
多自由度梯度磁场控制系统相关应用文献(2017-2022)
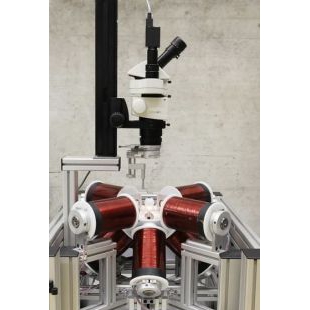
昊量光电新引入瑞士苏黎世联邦理工学院机器人与智能系统研究所研发的多自由度梯度磁场控制系统MFG系列。这些MFG多自由度梯度磁场控制系统能够产生各种各样的静态或时变磁场,用于研究磁场依赖现象,它们也用于开发磁性微纳米机器人以及其他微操作程序的应用。多自由度梯度磁场控制系统MFG系列产生场和场梯度,为5个自由度提供力和扭矩,非接触式驱动,用于颗粒定向和定位,粘滑或滚动运动,以及鞭毛游动。应用包括工程和流体动力学研究,局部流变学测量,微观力学生物学刺激和表征。
以下2017到2022年之间描述、使用或引用这款MiniMag / nanomag / OCTomag系统的相关文章列表:
1. Hongri Gu, Emre Hanedan, Quentin Boehler, Tian-Yun Huang, Arnold J.T.M. Mathijssen and Bradley Nelson. Artificial Microtubules for Rapid and Collective Transport of Magnetic Microcargoes. Nat. Mach. Intell. 4, 678-684 (2022).
摘要:微货物的定向运输对于生物体以及微机器人、纳米技术和生物医学的应用至关重要。现有的递送技术往往存在速度低、导航控制有限和心血管血流分散的问题。在细胞生物学中,这些问题在很大程度上由细胞骨架马达克服,这些马达沿着微管高速公路携带囊泡。受此启发,我们开发了一种人工微管(AMT),这是一种结构的微纤维,嵌入微磁铁,引导颗粒快速通过流动网络。与现有技术相比,在相同的驱动频率下,微货物的移动速度要快一个数量级,并且通过强大的动态锚定效应减轻了分散。即使在强大的流体流动中,巨大的局部磁场梯度也可以实现锚定和引导推进。zui后,我们证明了AMT可以促进微粒自组装成活性物质团簇,然后通过集体桥接垫脚石来提高它们的行走速度。因此,我们展示了一种独特的策略,用于微血管网络内的稳健递送和微创干预,其非平衡效应可能与增强生物运输过程同样相关。
2. T. Gwisai, N. Mirkhani, M.G. Christiansen, T.T. Nguyen, V. Ling and S. Schuerle. Magnetic torque-driven living microrobots for increased tumor infiltration. Sci. Robot. 7, eabo0665 (2022).
摘要:结合自推进和磁引导的细菌微型机器人越来越被认为是有前途的靶向癌症治疗药物递送载体。到目前为止,控制策略要么依赖于难以扩展的磁场梯度,要么使用受细菌马达限制的推进力的定向磁场。在这里,我们提出了一种基于旋转磁场的磁转矩驱动驱动方案,以无线控制磁螺旋藻AMB-1承载多功能脂质体货物。我们观察到通过血管内皮模型的共轭易位增加了4倍,并发现驱动这种增加的运输的主要机制是在细胞界面上的扭矩驱动的表面探索。使用球体作为三维肿瘤模型,荧光标记的细菌在暴露于旋转磁场的样品中以高达21倍的高信号定植其核心区域。除了增强传输外,我们还证明了这种磁刺激同时驱动和感应检测AMB-1的适用性。zui后,我们证明了RMF在小鼠全身静脉给药后显著增强体内AMB-1肿瘤积累。我们的研究结果表明,可扩展的磁转矩驱动控制策略可以很好地利用生物混合微型机器人。磁转矩驱动的运动增强了活体微型机器人在体外和体内跨越生理屏障的渗透。
3. H. Chen, Y. Li, Y. Wang, P. Ning, Y. Shen, X. Wei, Q. Feng, Y. Liu, Z. Li, C. Xu, S. Huang, C. Deng, P. Wang, and Y. Cheng. An Engineered Bacteria-Hybrid Microrobot with the Magnetothermal Bioswitch for Remotely Collective Perception and Imaging-Guided Cancer Treatment. ACS Nano 16, 6118−6133 (2022).
摘要:由多种推进力驱动的微型机器人在生理环境中具有巨大的无创靶向递送潜力。然而,在低雷诺数生物环境下的远程集体感知和精确推进仍然是微型机器人在体内实现预期治疗效果的主要挑战。在这里,我们报道了一种生物混合微型机器人,它集成了磁、热、缺氧敏感性和内部荧光蛋白,作为靶向癌症治疗的热和定位信号的双重报告者。微机器人系统中有三个关键元素,包括负载磁性纳米粒子(MNP)的益生菌大肠杆菌Nissle1917 (EcN@MNP),用于空间磁性和缺氧感知,设计到细菌中的热逻辑电路,用于控制mCherry的生物合成,作为温度和定位报告器,以及编码在EcN中的NDH-2酶,用于增强抗 癌治疗。根据基于荧光蛋白的成像反馈,该微型机器人在磁场作用下对肿瘤区域表现出良好的热敏性和主动靶向能力。结合磁热消融和NDH-2诱导的活性氧(ROS)损伤,在体外和体内有效地触发了癌细胞的凋亡。我们的研究表明,生物混合EcN微型机器人是一个理想的平台,将物理、生物和化学特性整合在一起,用于集体感知和推进靶向癌症治疗。
4. Jiaen Wu, David Folio, Jiawei Zhu, Bumjin Jang, Xiangzhong Chen, Junxiao Feng, Pietro Gambardella, Jordi Sort, Josep Puigmarti-Luis, Olgac Ergeneman, Antoine Ferreira and Salvador Pané. Motion Analysis and Real-Time Trajectory Prediction of Magnetically Steerable Catalytic Janus Micromotors. Advanced Intelligent Systems 4: no. 11, pp. 2200192 (2022)
摘要:化学驱动的微电机显示不可预测的轨迹,由于旋转布朗运动与周围的流体分子相互作用。这阻碍了这些微型机器人的实际应用,特别是在需要精确控制的地方。为了克服旋转布朗运动,增加运动的方向性,机器人通常用磁性成分装饰,并由外部磁场引导。然而,尽管方法简单,但对其运动的明确分析和建模仍然有限。在这里,催化Janus微电机制造与不同的磁化和磁性转向控制自推进运动显示。为了分析微电机的动态行为,从理论上建立了一种状态相关系数与鲁棒两级卡尔曼滤波器相结合的动态模型,该模型可以成功地实时预测微电机在均匀粘性流动中的运动轨迹。在大范围的模型参数变化范围内,理论预测的动力学和实验观测结果之间有很好的一致性。所建立的模型可以普遍适用于不同尺寸、几何形状和材料的各种催化微纳米发动机设计,甚至适用于不同的燃料溶液。zui后,该模型可作为生物传感、检测燃料浓度或确定未知环境下小型电机推进机制的平台。
5. Victor de la Asuncion-Nadal, Andrea Veciana, Shen Ning, Anastasia Terzopoulou, Semih Sevim, Xiang-Zhong Chen, De Gong, Jun Cai, Pedro Wendel-Garcia, Beatriz Jurado-Sanchez, Alberto Escarpa, Josep Puigmarti-Luis and Salvador Pané. MoSBOTs: Magnetically Driven Biotemplated MoS2-Based Microrobots for Biomedical Applications Small 18(33), pp. 2203821 (2022).
摘要:二维层状二硫化钼(MoS2)纳米材料具有很高的生物相容性、机械和电气性能以及灵活的功能化特性,是生物医学应用的一个很有前景的平台。此外,MoS2的带隙可以被设计成吸收宽波长范围内的光,然后将其转化为局部热,用于光热组织消融和再生。然而,诸如水分散体稳定性差和在受影响组织中的低蓄积等限制阻碍了MoS2在生物医学应用中的充分实现。为了克服这些挑战,本文提出了以蓝藻螺旋藻为生物模板的多功能MoS2磁性螺旋微型机器人(MoSBOTs),用于治疗和生物识别应用。细胞相容性微型机器人结合了近红外辐射下的远端磁导航和二硫化钼光热活性。由此产生的MoSBOTs的光吸收特性被用于靶向光热消融癌细胞和在微创肿瘤治疗应用中的动态生物识别。拟议的多治疗MoSBOT在无数癌症治疗和诊断相关应用中具有相当大的潜力,规避了当前消融手术的挑战。
6. Huaijuan Zhou, Carmen C. Mayorga-Martinez, Salvador Pané, Li Zhang, and Martin Pumera. Magnetically Driven Micro and Nanorobots. Chem. Rev. 121 (8), 4999–5041 (2021).
摘要:在不同的流体环境中,微和纳米游泳者的操纵和导航可以通过化学物质、外场甚至运动细胞来实现。基于磁场驱动策略具有远程和时空控制、无燃料、高度可重构性、可编程性、可回收性和通用性等优点,许多研究者选择磁场作为主动外部驱动源。这篇综述介绍了磁性微/纳米机器人的基本概念和优点,以及磁场和磁性材料的基本知识,磁场操作的设置,磁场结构,以及有效运动的对称破坏策略。讨论了这些概念来描述微/纳米机器人与磁场之间的相互作用。本文介绍了鞭毛磁机器人的驱动机制(如螺旋状运动和行波运动/纤毛运动)和表面行走器(如表面辅助运动),磁场在其他推进方法中的应用,以及微/纳米机器人在运动之外的磁刺激,以及(准)球形、螺旋形、柔性、线状和生物混合磁机器人的制造技术。MagRobots在靶向药物/基因递送、细胞操作、微创手术、活检、生物膜破坏/根除、成像引导递送/治疗/手术、环境修复污染去除和(生物)传感等方面的应用也进行了综述。zui后,讨论了磁动力小型化电机目前面临的挑战和未来的发展前景。
7. Pierre E. Dupont, Bradley J. Nelson, Michael Goldfarb, Blake Hannaford, Arianna Menciassi, Marcia K. OMalley, Nabil Simaan, Pietro Valdastri, and Guang-Zhong Yang. A decade retrospective of medical robotics research from 2010 to 2020. Sci. Robot. 6 (60), eabi8017 (2021).
摘要:机器人是一门前瞻性的学科。人们的注意力集中在确定下一个重大挑战上。然而,在医疗机器人等应用领域,重要的是要在清楚了解研究界zui近取得的成就以及这项工作在临床需求和商业化方面的地位的基础上规划未来。这篇综述文章确定并分析了过去十年中医疗机器人的八个关键研究主题。这些主题领域是使用确定十年中被引用次数zui多的论文的搜索标准确定的。我们这篇评论文章的目标是为读者提供一种方便的方式来快速欣赏过去十年中医疗机器人领域一些zui令人兴奋的成就;因此,我们只关注每个专题领域的少数开创性论文。我们希望本文能够培养研究者的创业精神,以缩小研究与翻译之间日益扩大的差距。
8. L. O. Mair, G.s Adam, S. Chowdhury, A. Davis, D. R. Arifin, F. M. Vassoler, H. H. Engelhard, J. Li, X. Tang, I. N. Weinberg, B. A. Evans, J. W.M. Bulte and D. J. Cappelleri. Soft Capsule Magnetic Millirobots for Region-Specific Drug Delivery in the Central Nervous System. Front. Robot. AI 8:702566. doi: 10.3389/frobt.2021.702566 (2021).
摘要:小型软机器人系统正在探索医学上的无数应用。具体来说,能够远程操作的磁驱动微型机器人在治疗药物和生物制剂的靶向递送方面具有巨大的潜力。以前在微型机器人上的许多努力都致力于在水环境和坚硬表面上的运动。然而,我们的人体是由致密的生物组织构成的,这就要求研究人员开发出能够在组织表面上移动的新型微型机器人。翻滚微型机器人是这些设备的一个子类,能够在旋转磁场引导下在表面上行走。利用微型机器人将有效载荷运送到敏感组织的特定区域是医疗微型机器人的主要目标。中 枢神经系统(CNS)组织由于其精致的结构和高度区域特异性的功能是一个主要的候选者。在这里,我们展示了软体海藻酸盐胶囊的表面行走能力,能够在离体大鼠皮层和小鼠脊髓上移动,展示了多位置小分子递送到每种组织上多达六个不同的位置,具有高空间特异性。海藻酸盐凝胶的柔软性可以防止微机器人在运动过程中与中 枢神经系统组织摩擦造成的损伤。该技术的发展可用于临床和临床前应用,如药物输送、神经刺激和诊断成像。
9. Daphne O. Asgeirsson, Michael G. Christiansen, Thomas Valentin, Luca Somm, Nima Mirkhani, Amin Hosseini Nami, Vahid Hosseini and Simone Schuerle. 3D magnetically controlLED spatiotemporal probing and actuation of collagen networks from a single cell perspective. Lab on a Chip, 21(20) 3850-3862 (2021)
摘要:细胞不断地感知和反应来自周围基质的机械信号,这些基质由生物聚合物的纤维网络组成,影响着细胞的命运和行为。利用磁控制的几种有效方法已经开发出来,以评估细胞外基质(ECM)模型内的微力学特性。然而,其中许多仅限于平面内传感和驱动,这不允许在其完整的3D环境中探测矩阵。此外,很少有人注意到模型ECM系统特有的因素,这些因素可以深刻地影响其中包含的细胞。在这里,我们提出了利用磁微探针(μ rod)在与细胞相关的尺度上对细胞外基质网络进行时空探测和操作的方法。我们的技术利用3D磁场生成,物理建模和图像分析来检查和应用纤维胶原蛋白基质的机械刺激。我们确定了剪切模量范围在数百Pa到数十kPa之间,并模拟了接近刚性表面和局部纤维致密化的影响。我们分析了响应10 pNm量级的磁扭矩所产生的矩阵变形的空间范围和动力学,在跨越数十微米的区域内偏转纤维。zui后,我们演示了荧光标记μ杆的三维驱动和姿态提取。
10. D. Ahmed, A. Sukho, D. Hauri, D. Rodrigue, G. Maranta, J. Harting and B. J. Nelson. Bioinspired acousto-magnetic microswarm robots with upstream motility. Nature Machine Intelligence 3, 116–124, 2021.
摘要:抗血流推进的能力,即执行正流变性,可以为靶向治疗和非侵入性手术的应用提供令人兴奋的机会。到目前为止,还没有生物相容的技术来引导微粒在背景流体中逆流而上。受到许多自然发生的微游泳者的启发,如细菌、精子和浮游生物,它们利用壁面的防滑边界条件来展示上游推进力,在这里,我们报告了自组装微群的设计和特征,这些微群可以在外部声场和磁场的组合下执行上游运动。声波和磁场对人体都是安全的,非侵入性的,可以深入人体,在临床环境中得到了很好的发展。这两个领域的结合可以克服单一驱动方法所遇到的局限性。讨论了微群进行滚动运动所需的声致反作用力的设计准则。我们展示了实验数据与我们的模型之间的定量一致,该模型捕获了滚动行为。上游能力提供了一种将小药物分子输送到难以到达的部位的设计策略,代表了实现微纳米系统导航对抗血流的基本步骤。
11. C. C. J. Alcantara, F. C., Landers, S. Kim, C. de Marco, D. Ahmed, B. J., Nelson, S. Pane. Mechanically interlocked 3D multi-material micromachines. Nat. Commun. 11:5957 [https://doi.ord/10.1038/s41467-020-19725-6] (2020).
摘要:金属和聚合物在物理化学性质上是不同的材料,但在功能上是互补的。因此,金属有机结构可以在小型机器人中引入丰富的新应用。然而,目前的制造技术无法加工三维金属和聚合物部件。在这里,我们展示了通过结合3D光刻、模具铸造和电沉积,混合微观结构可以互锁。我们的方法可用于实现具有前所未有的分辨率和拓扑复杂性的复杂多材料微器件。我们证明了金属成分可以与由不同种类的聚合物制成的结构相结合。金属和聚合物的特性可以并行利用,从而产生具有高磁响应性、高药物负载能力、按需形状转换和弹性行为的结构。我们通过展示新的微型机器人运动模式和控制的群体聚集来展示我们的方法的优势。
12. N Mirkhani, M Christiansen and S. Schuerle. Living, self-replicating ferrofluids for fluidic transport. Adv. Funct. Mater. 2020, 2003912.
摘要:磁驱动为微流体泵送和靶向药物输送等应用提供了一种无线控制铁磁流体流动的方法。尽管这些概念很有前景,但实际使用合成铁磁流体作为流动致动器通常需要高浓度,并且受到低铁磁流体动力耦合效率和不均匀流场的阻碍。受趋磁细菌(MTB)表现出的磁性和流体动力学形式的启发,这项工作研究了将这些微生物作为一种活的、自我复制的铁磁流体,通过磁力强制旋转来改善流体运输。以多核氧化铁纳米颗粒作为性能基准,在旋转磁场下的MTB显示出更均匀和高效的流动。无论是磁性材料的体积还是总的体积分数的比较,都增强了耦合性。为了阐明在输运中与边界的相互作用的机制作用,开发了一个计算模型并进行了实验验证。应用该模型,预测了两种不同且可行的磁控制策略:一个旋转梯度场,尽管边界促进相反方向的流动,但仍产生定向流动;一个静磁门控场,实现空间选择性驱动。为MTB确定的优势属性为实现这些策略打开了设计空间。
13. M. K. Hausmann, A. Hauser, G. Siqueira, R. Libanori, S. L. Vehusheia, S. Schuerle, T. Zimmermann and A. R. Studart. Cellulose-Based Microparticles for Magnetically Controlled Optical modulation and Sensing. Small 16, 1904251 (2020).
摘要:具有双折射光学特性的响应材料已经在一些现代电子设备中被用于光的操纵。虽然电场通常用于实现光调制,但磁刺激可能为远程控制和操纵光提供诱人的补充方法。本文报道了具有不同寻常磁光性质的磁响应双折射微粒的合成和表征。这些功能微颗粒是通过微流控乳化工艺制备的,其中水基液滴在流动聚焦装置中产生并拉伸成各向异性形状,然后通过光聚合转化为颗粒。双折射特性是通过在液滴拉伸过程中将纤维素纳米晶体排列在微颗粒内来实现的,而磁性响应性是通过在初始液滴模板中添加超顺磁性纳米颗粒来实现的。当悬浮在流体中时,微粒子可以通过外部磁场进行可控操纵,从而产生独特的磁光耦合效应。使用一个远程驱动的磁场耦合到偏振光学显微镜,这些微粒可以用来将磁信号转换成光信号,或者通过磁驱动的微流变学来估计悬浮流体的粘度。
14. M. Xie, W. Zhang, C. fan, C. Wu, Q. Feng, J. Wu, Y. Li, R. Gao, Z. Li, Q. Wang, Y. Cheng and B.He. Bioinspired Soft Microrobots with Precise Magneto-Collective Control for Microvascular Thrombolysis. Adv. Mater. 32, 2000366 (2020).
摘要:用于生物医学应用的新时代软体微型机器人需要模仿自然界生物的基本结构和集体功能。生物相容性界面、智能功能和精确的运动控制是设计复杂生物环境下软体微型机器人的关键参数。在这项工作中,受趋磁细菌(MTB)的启发,开发了一种具有快速运动响应和精确定位的仿生磁性微机器人(BMM),用于靶向溶栓。与MTB中的磁小体结构类似,BMM由嵌入在非膨胀微凝胶壳中的排列的氧化铁纳米颗粒(MNP)链组成。在静态磁场作用下,MNPs的粒子间偶极相互作用形成了线性链。仿真结果表明,装配的程度和速度与场强成正比。BMM在旋转磁场下实现了161.7µm s−1的zui大转速和小于4%的精确定位控制。重要的是,对BMMs的运动分析表明,在8Hz频率下,BMMs的同步与频率相关,而在更高频率下,由于阻力扭矩的增加,BMMs的异步化。BMM可以通过磁集体控制传递和释放溶栓药物,有望用于超微创溶栓。
15. Roberto Bernasconi, Elena Carrara, Marcus Hoop, Fajer Mushtaq, Xiangzhong Chen, Bradley J. Nelson, Salvador Pané, Caterina Credi, Marinella Levi, Luca Magagnin. Magnetically navigable 3D printed multifunctional microdevices for environmental applications. Additive Manufacturing 28, 127–135 (2019)
摘要:结合立体光刻3D打印和湿金属化技术,制作了用于水清洗的微型机器人原型。使用化学和电解沉积在3D打印部件上沉积不同的金属层,以赋予所需的功能。特别是,利用电解共沉积的灵活性和多功能性,污染物光降解和细菌杀灭第1次结合在同一设备上,通过在银基质中涂覆含有二氧化钛纳米粒子的复合纳米涂层。由此获得的微型机器人的微观结构得到了充分的表征,并通过施加旋转磁场成功地驱动了它们。从水净化的角度来看,该装置对水污染物具有明显的光催化活性,对革兰氏阴性菌具有抗 菌活性。
16. J. Xie, C. Bi, D. J. Cappelleri and N. Chakraborty. Towards Dynamic Simulation Guided Optimal Design Of Tumbling MicrorobotS. Proc.ASME 2019 Intl. Des. Engin. Techn. Conf. and Comp and Inform. Engin. Conf. IDETC/CIE2019 (2019).
摘要:小型机器人的设计是一个基于试错的过程,既昂贵又耗时。目前还没有很好的动态仿真工具来预测微型机器人在基底上移动时的运动或性能。在较小的长度尺度上,粘附和摩擦的影响(随表面积的变化)变得更加明显。因此,假设两个物体之间的接触可以被建模为点接触的刚体动力学模拟器是不合适的。在本文中,我们提出了模拟微型机器人运动的技术,其中机器人与衬底之间可能存在间歇性和非点接触。我们使用这个模拟器来研究不同形状的微型机器人的运动,并选择zui有希望执行给定任务的形状。
17. S. Schuerle, A. P. Soleimany, T. Yeh, G. M. Anand, M. Häberli, H. E. Fleming, N. Mirkhani, F. Qiu, S. Hauert, X. Wang, B. J. Nelson. N. Bhatia. Synthetic and living micropropellers for convection-enhanced nanoparticle transport. Sci. Sci. Adv. 5(4), eaav4803 (2019)
摘要:纳米颗粒(NPs)已成为治疗各种疾病(包括癌症、心血管和炎症性疾病)的有利药物输送平台。然而,它们将物质运送到病变组织的功效受到一些生理障碍的阻碍。一个障碍是将药物从血管中转运出来,再加上随后进入目标组织的困难。在这里,我们报告了使用两个不同的由旋转磁场驱动的微螺旋桨,通过增强局部流体对流来增加扩散受限的NP输运。在第1种方法中,我们使用了一种称为人工细菌鞭毛(ABF)的合成磁性微机器人,在第二种方法中,我们使用趋磁细菌(MTB)群通过利用铁流体动力学创造了一种可指导的“活铁磁流体”。这两种方法都增强了血液外渗和组织渗透的微流体模型中的NP运输,该模型由以胶原基质为边界的微通道组成。
18. Daniel Ahmed, Thierry Baasch, Nicolas Blondel, Nino Läubli, Jürg Dual & Bradley J. Nelson. Neutrophil-inspired propulsion in a combined acoustic and magnetic field. Nature Communications 8, Article number: 770 (2017)
摘要:能够在血管系统中精确运动的系统可以为靶向治疗和非侵入性手术的应用提供令人兴奋的可能性。到目前为止,大部分工作都是在二维环境中分析推进,在边界附近的可控性有限。在这里,我们展示了仿生滚动运动,通过在磁场和声场中引入超顺磁粒子,灵感来自于在墙壁上滚动的中性粒细胞。在旋转磁场的作用下,由于偶极子-偶极子相互作用,粒子自组装。由于声场的辐射力,聚集体向通道壁迁移。通过结合这两个场,我们实现了沿边界的滚动式运动。声场和磁场的使用在临床环境中已经成熟。这两个领域的结合能够克服单一驱动技术所遇到的局限性。我们相信我们的方法将对靶向治疗产生深远的影响。
19. Burak Zeydan, Andrew J. Petruska, Luca Somm, Roel Pieters, Yang Fang, David F. Sargent, Bradley J. Nelson. Automated Particle Collection for Protein Crystal Harvesting. IEEE Robotics and Automation Letters 2(3), (2017)
摘要:介绍了一种用于X射线晶体学的蛋白质晶体采集自动化系统。该系统使用了一个基于商用现货组件的紫外线成像系统、一个磁控工具和一个弹性行为控制器。该系统通过收集超过350个聚苯乙烯珠(用作晶体模拟器),并在14小时内在没有人为干预的情况下将它们运送到2毫米的预定目标来验证。识别,收集,运输和交付晶体模拟器的平均时间为2.4分钟,类似于专家操作员。这是一个完全自动化的蛋白质晶体采集系统的次第1演示。
20. Simone Schuerle, Ima Avalos Vizcarra, Jens Moeller, Mahmut Selman Sakar, Berna Özkale, André Machado Lindo, Fajer Mushtaq, Ingmar Schoen, Salvador Pané, Viola Vogel and Bradley J. Nelson. Robotically controlled microprey to resolve initial attack modes preceding phagocytosis. Science Robotics 2(2), eaah6094 (2017)
摘要:吞噬细胞,免疫系统的掠食性细胞,不断探测其细胞微环境,寻找入侵者。这需要猎物的识别,然后形成足够稳定的身体接触。尽管免疫细胞必须施加物理力来拾取它们的微生物猎物,但由于缺乏适当的技术,人们对它们在吞噬前的狩猎行为知之甚少。为了研究吞噬细胞的捕猎行为,在这种行为中,猎物附着在物体表面的粘合剂必须被破坏,我们利用微型机器人探针来模拟细菌。我们使用5自由度磁梯度控制系统(5D-MTS)模拟不同的狩猎场景,通过与单个巨噬细胞对抗模拟猎物的微磁铁。通过动态调整引导这些微粒平移和旋转运动的能量格局,探索平移和旋转阻力如何调节巨噬细胞攻击模式。对于平移抵抗性猎物,观察到明显的推拉攻击。对于杆状、无抵抗力的猎物,它们模仿自由漂浮的病原体,细胞将猎物与它们的长轴对齐,以方便捕获。增加旋转陷阱的刚度来模拟抵抗性或表面束缚的猎物会破坏这种重新调整过程。在105皮牛顿纳米弧度- 1左右的刚度水平下,巨噬细胞无法重新调整猎物,从而抑制了摄取。我们的5D-MTS被用作概念验证研究,以高空间和时间分辨率探测吞噬细胞的平移和旋转攻击模式,尽管该系统也可用于从单细胞到器官芯片设备的长度尺度上的各种其他机械生物学研究。
21. Naveen Shamsudhin, Vladimir I. Zverev, Henrik Keller, Salvador Pane, Peter W. Egolf, Bradley J. Nelson, Alexander M. Tishin. Magnetically guided capsule endoscopy. Med. Phys. 44 (8), e91-e111 (2017)
摘要:无线胶囊内窥镜(WCE)是一种强大的医学筛查和诊断工具,它是一个小胶囊被吞下并通过人体胃肠道(GI)的自然蠕动和重力移动。集成摄像头的胶囊允许小肠的可视化,这是以前传统的柔性内窥镜无法到达的区域。作为一种诊断工具,它可以定位胃肠道中部出血的来源,并识别炎症性肠病(克罗恩病)、息肉病综合征和肿瘤等疾病。WCE的筛查和诊断效果,特别是在胃区域,受到各种技术挑战的阻碍,如缺乏主动的荚膜位置和方向控制。由于胶囊体积和能量储存的限制,大多数商业胶囊缺乏治疗功能。利用人体外源磁场来引导、定向、驱动和操作胶囊及其机制的可能性导致了对磁引导胶囊内窥镜(MGCE)的研究越来越多。本工作简要回顾了WCE技术的历史和现状。它强调了磁技术在推进WCE诊断和治疗功能方面的作用。这篇综述不仅局限于胃肠道,还进一步研究了磁引导微型机器人的技术发展,这些机器人可以在体内充满空气和液体的腔体和腔体中导航,用于微创医学。
22. Petruska, A.J., Edelmann, J., Nelson, B.J. Model-Based calibration for Magnetic Manipulation. IEEE Transactions on Magnetics 53.7, 2017
摘要:基于模型的磁工作空间校准不仅提供了磁场及其梯度矩阵的平滑表示,而且还使用物理约束来平滑校准测量。本文第1次提出了一种基于模型的磁操纵系统标定技术,该技术采用非线性zui小二乘法求解每个源的标量势。通过数值有限元仿真和实际系统的实例标定,验证了该方法的性能,该方法可以实现0.9997的r2值。此外,为了方便起见,给出了球面多极展开的前三个空间导数的解析表达式,它们对应于工作空间中磁偶极子上的扭矩、力和力-空间变化率。
如果您对多自由度磁场控制系统有兴趣,请访问上海昊量光电的官方网页:
https://www.auniontech.com/details-2092.html
欢迎继续关注上海昊量光电的各大媒体平台,我们将不定期推出各种产品介绍与技术新闻。
更多详情请联系昊量光电/欢迎直接联系昊量光电
关于昊量光电:
上海昊量光电设备有限公司是光电产品专业代理商,产品包括各类激光器、光电调制器、光学测量设备、光学元件等,涉及应用涵盖了材料加工、光通讯、生物医疗、科学研究、国防、量子光学、生物显微、物联传感、激光制造等;可为客户提供完整的设备安装,培训,硬件开发,软件开发,系统集成等服务。
您可以通过我们昊量光电的官方网站www.auniontech.com了解更多的产品信息,或直接来电咨询4006-888-532。
相关产品
全部评论(0条)
推荐阅读
-

- 液相色谱梯度怎么设置最好,液相色谱仪梯度
- 液相色谱梯度的优化设置应综合考虑样品类型、分离需求、溶剂配比、流速、升温速率等多个因素。通过精细化的实验操作和数据反馈调整,科学合理地设置梯度,可以实现佳的分离效果。
-

- 液相色谱梯度怎么执行标准,液相色谱仪梯度
- 液相色谱梯度执行标准是确保实验结果准确性和可重复性的关键因素之一。通过合理设计梯度曲线、优化流速和溶剂浓度、精确控制压力以及严格验证系统稳定性,实验人员能够在不同的实验条件下获得理想的分离效果。
-

- 磁光克尔显微镜:让磁场“显形”的黑科技,到底有多神奇?
- 你是否想过,科学家如何“看见”一块金属内部的磁场?没有颜色,没有形状,磁场仿佛隐形在材料中。但有一种“魔法”——磁光克尔显微镜,能让磁场“原形毕露”。今天,我们就来揭开它的神秘面纱!
-

- 液相色谱梯度洗脱教程,液相色谱仪梯度洗脱方法
- 液相色谱梯度洗脱技术在现代分析化学中占有重要地位,凭借其高效、的分离能力,已成为分子分析和化合物分离的基础工具。
-

- 液相色谱梯度洗脱适用,液相色谱梯度洗脱适用范围
- 液相色谱梯度洗脱技术凭借其高效、灵敏、的特点,在多个领域中具有广泛的应用前景。无论是在药物分析、环境监测还是食品安全检测中,梯度洗脱都提供了强有力的技术支持。随着相关技术的不断发展和优化。
-

- 液相色谱调整梯度,液相色谱仪梯度程序怎么设置
- 液相色谱的梯度调整是确保分离效果优化的关键步骤。通过对梯度程序的合理调整,不仅可以提升样品分析的分离效率,还能提高检测的灵敏度和准确性。成功的梯度优化需要根据样品的性质和分析目标精确调整。
-
- 【有奖问卷调查】水处理相关应用
- 【有奖问卷调查】水处理相关应用
-

- 液相色谱梯度洗脱的优点,液相色谱仪梯度洗脱方法
- 液相色谱梯度洗脱凭借其高效的分离能力、缩短分析时间和提升分辨率等显著优点,已成为各类复杂样品分析中的核心技术之一。在实际应用中,梯度洗脱不仅能提高分析效率和精度。
-

- 液相色谱梯度洗脱使用,液相色谱梯度洗脱的优点
- 液相色谱梯度洗脱技术在现代分析化学中占有重要地位,凭借其分离效率高、分析时间短、适用范围广等优势,已广泛应用于药物检测、环境监测、食品分析等多个领域。
-

- 液相色谱梯度洗脱优点,高效液相色谱梯度洗脱原理
- 液相色谱梯度洗脱技术在提高分离度、缩短分析时间、扩展应用范围等方面具有显著优势。其灵活性和高效性使其成为复杂样品分析中不可或缺的重要工具。通过不断优化梯度洗脱条件,可以进一步提升分析的精度和可靠性。
-

- 液相色谱梯度洗脱注意事项,高效液相色谱仪梯度洗脱设置
- 液相色谱的梯度洗脱技术是分析复杂样品时的有效工具,但要获得理想的分离效果,必须注重多个方面的优化,包括梯度设置、流动相选择、温度控制及峰形管理等。通过合理的操作和精细化的设备维护。







①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi








参与评论
登录后参与评论