(英文:Inertial measurement unit,简称 IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。
一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中用着很重要的应用价值。
为了提高可靠性,还可以为每个轴配备更多的传感器。一般而言IMU要安装在被测物体的ZX上。
IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、和航天器的惯性导航设备等。
 烟气浓度测量设备LB-62便携式烟气检测仪配手持式烟气预处理
烟气浓度测量设备LB-62便携式烟气检测仪配手持式烟气预处理
 TVM视频测量系统——回顾来自客户的5个重要提问
TVM视频测量系统——回顾来自客户的5个重要提问
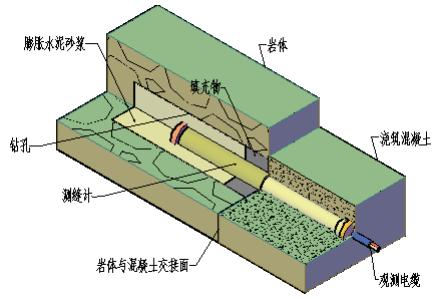 mcu自动化测量单元之岩体与混凝土交接面埋设
mcu自动化测量单元之岩体与混凝土交接面埋设

 评论
评论

