详细信息
| 产品介绍 |
斗轮机全自动三维激光扫描盘煤系统-是北京三维麦普导航测绘技术有限公司依托武汉测绘科技大学新出的测绘软件成果,于2012年,在国内老款固定式盘煤仪的基础上率先开发的,它利用GPS定位扫描仪位置(GPS水平定位误差1厘米,高程误差2厘米).利用二维扫描仪高速扫描倾角距离,利用多传感器进行精密侧向测角,结合测绘成图、三维图形处理技术研发的一种新型高精度盘库系统,它大大改进了市场原有的老款盘煤仪通过形成编码器测量距离误差过大、垂直角、编码器测角精度低的问题.该系统可以应用于任意形状堆料的体积测量 ,是数字化煤场的可靠地前端采集设备。 斗轮机全自动三维激光扫描盘煤系统远距离慢速型激光扫描器是已经拥有10年历史的性能稳定的激光扫描器,它采用成熟的激光-时间飞行原理,非接触式检测,IP67的防护等级,内部集成加热器,使得其可以用在室外恶劣环境下的区域防撞及测量,测距为250米,(10%反射率时为150米),数据接口为RS422及以太网接口,PNP开漏输出。 工作原理和过程 1.1 本系统以堆取料机(以悬臂式堆取料机为例:图1)为载体,采用激光扫描测距技术和位置传感技术,即时获取被测料场的空间位置信息数据,并同步传输到计算机平台。该系统采集数据最关键的一个环节是,通过激光扫描仪二维扇面扫描物料表面,获取被测煤场的与激光扫描仪之间的角度信息和距离信息(图2)
图1 
图2 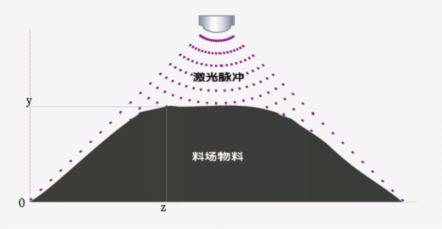
图3
图4
图5
 1.3 通过构建不规则三角网,被测物料形状被分解成数以万计的三棱柱体,计算每个三棱柱体的体积,对所有三棱柱体积进行累加,就得到被测物料的体积(图6)。同时软件可以实现对被测物体的分割计算(图7)。 1.3 通过构建不规则三角网,被测物料形状被分解成数以万计的三棱柱体,计算每个三棱柱体的体积,对所有三棱柱体积进行累加,就得到被测物料的体积(图6)。同时软件可以实现对被测物体的分割计算(图7)。
图6

图7

产品的特点: 系统的相对精度和精度具有高精度的特性体积误差可以达到千分之六以内。 全自动扫描,测量速度快。 IP67防水可全天候工作测量精度不受人为因素天气因素、堆体形状影响。 软件操作简单。 单人可完成操作。 长检测距离(最远250米) 高角度分辨率(0.125度) 大扫描角度(Max:300度,可以在设置参数中调整) 测量原理: 本产品采用二维高速激光扫描仪采集煤堆上高密度断面数据结合GPS系统及传感器获得扫描仪的空间坐标及角度信息实现三维点云采集三维图型显示并可经报表和图形打印输出的堆体体积测量系统。 应用领域: 火电企业、港口码头、钢铁厂、冶金单位、化工企业、建筑土石方开挖现场、露天矿开采现场、岩石剖面测量。 安装位置: 可安装在露天斗轮机、龙门吊、桥抓、圆形煤场堆取料机、其它各种机械平台煤场(非露天不适用于GPS)。 设备组成: | 进口二维激光扫描仪 | 对堆体表面进行高频率断面,扫描将角度和距离输出到控制终端。 | | | 双频高精度GPS | 该高精度GPS可完成扫描仪的实时三维坐标测量,水平定位精度达1厘米,高程定位 精度2厘米.此坐标是煤堆扫描过程中的坐标起算点。煤堆表面坐标均以此点为参考点。当扫描仪位置发生移动时,GPS也可以实时获得扫描仪三维坐标。 | | | 测向测角模块 | 获得扫描仪的水平方位角。 | | | 现场控制器 | 该控制器与现场多种传感器、控制硬件设备连接,完成动作控制及数据采集。主要功能有实时数据收发、数据解算/存储.此控制器可向用户提供多种标准计算机
接口。 | | | 进口姿态传感器 | 测量系统的辅助校正装置,采用高精度双轴倾斜传感器模组,目的是防止在测量过程中因测量平台发生倾斜而造成的点位坐标计算误差,通过我们的快速算法, 无论平台处于何种状态(主要是指水平程度),都能保证点位坐标的测量精度,省去了设备安装调平步骤,实现真正的“安装即用”。 | | | 主控室电脑 | 负责安装盘煤软件,处理三维点云数据建立三维立体模型,生成报表。 | |
|
| 技术参数 |
| 最远检测距离 | 250m | | 10%反射率检测距离 | 150m | | 扫描角度 | Max:300°,可以在设置参数中调整 | | 角度步进分辨率 | 0 125/0.25°/0.5°/10°可调 | | 扫描频率 | 10HZ(扫描角度范围的重复次数) | | 响应时间 | 200ms~10ms | | 分辨率/系统误差 | 3.9mm/typ.±25mm | | 激光二极管波长 | 红色外光905纳米 | | 数据接口 | RS422/Ethernet | | 通讯速率 | 9.6/19.2/38.4/57.6/115.2K/1M/10M(bps) | | 开关量输出 | 4*PNP;typ;±24VDC | | 激光防护等级 | 一级(人眼安全) | | 工作电压/功耗 | 24VDC±15% | | 工作温度/储存温度 | -25~45℃/-20~80℃ | | 防护等级 | IP67 | | 外形尺寸(W*H*D) | 350*264*287mm | | 重量 | 9.1kg | | 软件 | | 软件 | SOPAS Engineering软件 | | 系统综合误差 | | 系统整体相对误差精度 | 体积一千立方米以上,误差小于0.5% | | 单一煤场测量时间 | 15到45分钟 | | 软件推荐配置要求 | 2.6G以上CPU,1G以上内存,128M以上独立显卡,80G以上硬盘 | | 激光测量距离 | 80-250米以上 | | 激光距离测量分辨率 | 毫米级 | | 无线传输距离 | 3公里(无遮挡) | | 天线传输速率 | 天线传输速率,最大54Mbps | | 报表格式 | 支持PDF,WORD等通用文件格式,支持通用网页数据格式 | | GPS定位系统参数 | | 水平定位精度 | ±(10+1×10-6D)mm | | 垂直定位精度 | ±(20+1×10-6D)mm | | 扫描角度 | Max:300,可在设置参数中调整 | | 角度步进分辨率 | 0.125°/0.25°/0.5°/1.0°可调 | | 扫描频率 | 10Hz(300°的扇面往复次数) | | 响应时间 | 200m/s-100m/s | | 分辨率/系统误差 | 3.9mm/typ.±25mm | | 激光二极管波长 | 红色外光905nm | | 数据接口 | RS422/Ethernet | | 通讯速率 | 9.6/19.2/38.4/57.6/115.2/1M/10M(bps) | | 开关量输出 | 4*PNP;typ.±24VDC | | 激光防护等级 | 1级(人眼安全) | | 工作电压/功耗 | 24VDC±15% | | 工作温度/存储温度 | -25-45℃/-20-80℃ | | 防护等级 | IP67 | | 扫描频率 | 10Hz(300 的扇面往复次数) | | 重量 | 9.1Kg | | 美国测向测角模块 | | 定向精度 | 0.2° | | 进口姿态传感器 | | 补偿精度 | 0.008° | | 补偿范围 | ±15° | | 现场工业控制电脑 | | 主频 | 2.6GHz | | 处理器 | interi7处理器 | | 内存 | 1G | | 硬盘 | 80G | | 数据接口 | RS232,USB | | 三维显示 | 真实再现煤场料堆形状,精确计算体积,存储历史数据 | | 分堆的计算功能 | 精确标定三维图形中任意点三维坐标,便于比对 | | 数据输出 | 输出订制的通用格式数据报表用于存档管理 | | 历史数据管理 | 根据用户要求保存历史数据并根据设置自动管理 | | 体积计算模型类型 型 | 用三角网建立模型 精度高于用防伪网建立的模 |
|
|
备注:以上方案还可选配动力马达机构,该马达机构可控制整个测量系统的水平旋转,自带角度高精度角度编码器,其测角精度0.009度;在进行煤堆扫描时不在依赖平台的位移和吊臂的旋转,可在任意固定位置开始全自动扫描,且测量用时很少约5-10分钟.带马达机构的扫描系统适合安装于堆场上方平台(悬臂式斗轮机平台或现场其它高台构筑物平台),可测量平台周围200米范围内的堆体体积。 应用场所 港口岸桥大梁防撞,集装箱外型扫描,煤堆体积及轮廓测量,安防等远距离测量或扫描精度较高的室外场合。 三维的优势: 1.技术上,三维与数据的处理同步进行,让使用者能够在盘煤过程中便即时获取盘煤结果,包括图形和数据。同时,三维在硬件设计不断吸取经验,持续改进和加强做到结构更加合理和稳定。 2.固定式盘煤系统的安装和调试是极为重要的环节,直接决定了盘煤系统的精确度、稳定性和可操作性,三维的工程技术人员具有丰富的现场安装和调试经验,能够根据不同料场具体情况具体分析,设计出盘煤解决设计和施工调试方案并加以实施。 |
核心参数
仪器种类: 固定
产品优势
斗轮机全自动三维激光扫描盘煤系统-是北京三维麦普导航测绘技术有限公司依托武汉测绘科技大学新出的测绘软件成果,于2012年,在国内老款固定式盘煤仪的基础上率先开发的,它利用GPS定位扫描仪位置(GPS水平定位误差1厘米,高 程误差2厘米).利用二维扫描仪高速扫描倾角距离,利用多传感器进行精密侧向测角,结合测绘成图、三维图形处理技术研发的一种新型高精度盘库系统,它大大改进了市场原有的老款盘煤仪通过形成编码器测量距离误差过大、垂直角、编码器测角精度低的问题.该系统可以应用于任意形状堆料的体积测量 ,是数字化煤场的可靠地前端采集设备。







