深度测量 具有动态压力效应补偿功能的 FlowTracker2
01
概 述
02
FLOWTRACKER2
压力传感器的实现
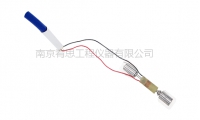
压力传感器本身嵌入 FlowTracker2 声学传感器头部的底座中。图 1 中可以看到探头底部和两侧的小透气孔,这使得传感器能够有效读取水压。传感器实际位于探头底部上方约 1 厘米处,这一偏移量在 SonTek 工厂进行测量的,并在校准过程中纳入计算。
使用非透气压力传感器代替传统的透气压力传感器。非透气压力传感器更耐用,不易受潮。在开始测量之前,用户需要测量空气中的大气压力,以“校准”传感器。
图1.SonTek FlowTracker2 探测头显示
压力传感器的透气孔
当压力传感器置于流动的水中时,测量的压力会受到伯努利原理的影响,从而产生与速度相关的偏移。
伯努利原理是流体力学中的一个标准概念,广泛应用于航空、液压和热力学领域。对于流体而言,该原理从一般运动方程中推导出来,可以概括为:
其中,ρ 是流体密度,v 是流体速度,g 是重力加速度,h 是相对于所选基准线的流线纵坐标,P 是在某一点测量的压力。第一项代表动态压力,可以看作是流体运动的动能。第二项是静水压力,可以看作是流体静止时的势能。第三项是通过传感器测量的压力。
根据伯努利原理,在封闭系统中,动压、静压和测量压力之和必须保持不变。这意味着,在水深(或静水压力)不变的情况下,流体速度的增加必然对应测量压力的降低。
图 2 显示了伯努利效应对在拖曳槽中以设定速度拖曳的 FlowTracker2 探头的压力测量值的影响。
图2.以不同速度拖曳时来自
FlowTracker2 探头的压力数据。
在所有流速运行过程中,探头本身固定在恒定深度。正如公式 1 所预测的那样,流速增加会导致测量压力降低。在流速为 1 米/秒时,测量压力读数比无水流时低约 0.05 dbar,产生约 5 厘米的等效水深偏移。这种偏移与速度有关,必须进行补偿才能准确测量水深。FlowTracker2 具有高度精确的速度测量功能,在应用补偿方面具有独特的优势。
测量压力 Pm 必须修正到压力 Pc,即修正后的压力。假设 Pm 包括公式 1 中的静水压力项,我们可以将修正后的压力 Pc 写为:
其中 b 是考虑伯努利效应的压力修正系数。
公式 2 中的最后一项表示动态压力校正,它取决于流体密度 ρ。通常,流体密度取决于温度和盐度。除非用户输入了既定的温度值,否则使用 FlowTracker2 探头内置温度传感器的温度测量值来计算。同样,如果用户输入了盐度值,该值也将纳入密度计算。否则,默认盐度为 0(淡水)。现场流体的密度也随大地水准面在特定地理位置的重力变化而变化;通过使用 FlowTracker2 的 GPS 功能,如果记录了 GPS 位置,最终密度值将补偿测量处的纬度和高度。这样,FlowTracker2 就能计算出精确的密度值,这是计算 b 所必需的,也是在现场进行实际测量时确定声速所必需的。
为了从公式 2 中得到 b,我们采用经验方法,使用从已知参考速度的拖曳槽收集的数据来拟合特定几何形状探头的修正系数。公式 2 中的 Pc 是探头未移动时的测量压力值,Pm 是探头被拖曳时记录的测量压力值。我们预计压力修正将随探头形状的变化而变化,因此在将 b 整理为校正系数时考虑到了这一点。不同的探测头(2D 或 3D)会有与之相关的不同 b 值。
分析中仅使用向前(相对于探头)运行的拖曳槽的压力数据
图3.以 6 英尺/秒(1.88 米/秒)
速度运行的压力数据
目的是使用拖曳槽数据来建立测量压力与拖曳速度之间的关系。图 3 显示了一个以 6 英尺/秒(1.88 米/秒)速度拖曳运行的压力数据示例。校正压力 Pc 是探头未移动时的平均压力值,等于静水压力。为消除每次拖曳过程中的上升和下降影响,使用压力数据的中心 1/3 计算与该速度相关的平均 Pm。这些平均压力测量值与拖车速度的关系在图 4 中用黄色圆圈表示。
图4.HIF 拖曳槽运行的平均压力与拖车速度关系。
黄色圆圈代表实际测量值(Pm)
蓝线是用线性回归法绘制的公式 2,目的是确定
b 红色圆圈代表校正压力 Pc
图 4 所示的测量压力与速度之间的抛物线关系证明我们使用公式 2 是正确的,该公式预示测量压力的伯努利效应将随着速度平方的增加而增加。压力修正系数 b 通过公式 2 的线性回归确定。拟合结果如图 4 中的蓝线所示。在这组拖曳槽运行中,b=0.4223。HIF 和 SonTek 工厂对不同组拖曳槽运行的 b 值取平均值。为了验证模型的校正,对 Pc 进行了计算,并在图4中用红圈标出。校正压力值不再与速度相关,伯努利效应也被消除,从而获得正确的深度测量值。在实际测量过程中,实时计算公式 2 中的 bρv2 项,以获得校正的压力 Pc。
03
Flowtracker2 使用
压力传感器与传统的
涉水杆深度测量的对比
为证明压力传感器校正和使用的有效性,我们展示了一次包含人工测深杆读数和压力传感器读数的流量测量。测量地点位于亚利桑那州尤马附近的 USGS 站点 09522600(如图 5 所示)。
图5.USGS测量站点09522600
在每条垂线位置,都使用压力传感器和测深杆记录了水深。图 6 中绘制了横断面上的深度剖面图。使用这两种方法记录的横断面深度相同,误差在人工测深杆深度读数范围内。
图6.USGS 站点 09522600 各测站的深度
上图为压力传感器记录的深度
下图使用的是用测深杆人工读取的深度
表 1 将两种方法计算出的流量与 USGS 水文测量站报告的该站点额定流量进行了比较和汇总。
USGS 额定流量 | 使用压力传感器的 FT2 | 使用测深杆深度的 FT2 |
58 | 57.0438 | 57.1779 |
流量值之间的误差在 2% 以内,表明用压力传感器代替测深杆进行深度测量是使用 FlowTracker2 进行流量测量的其中一种准确方法。
压力传感器选件可自动读取水深和探头测量深度,从而规范和简化现场测量。
上述内容,转载赛莱默水质水文分析仪器
一直信守“以科技创新赋能社会公共事业发展”,赢得了广大客户的一致好评。
产品使用遍布大江南北,愿和广大环保工作者一起,共同守护祖国母亲的绿水青山!
.水环境数据服务商
400-008-5117
服务 绿色南通智能守护|澄峰无人船在行动
服务 助力宜兴市水域监测,开启巡测新篇章
活动 高校携手-开启无人船探索之旅体验活动
活动 西交利物浦大学与联合实践体验活动圆满落幕
无人船 长江测流服务完美收官
仪器 新EXO水质仪:开启多参数水质监测新时代!
荣誉 喜讯!荣获上海市2021年度“专精特新”企业荣誉称号
关注我们 了解更多服务
全部评论(0条)
推荐阅读
-
- 深度测量 具有动态压力效应补偿功能的 FlowTracker2
- 内置压力传感器的增强版 FlowTracker2 声学多普勒流速仪(ADV)
-

- 山区道路的积雪深度测量
- 雪深观测是地面气象观测,人们以前监测积雪深度的方式比较辛苦,都需要人工观测,而且很难实现数据的实时反馈,存在延迟和误差。
-

- “基于全补偿的压力精准测量系统”荣获科研成果奖三等奖
- 该项成果取得发明专利1项、专著2本、实用新型专利7项、计算机软件著作权登记证书10项;发表学术论文35篇(SCI检索1篇),起草国家计量技术规范2项,地方计量技术规范9项。
-
- 振弦式表面应变计具有哪些功能?
- 在现代工程领域中,振弦式表面式应变计作为一种至关重要的测量工具,发挥着举足轻重的作用。它是一种专门用于测量结构表面应变的传感器,通过精确的测量和数据反馈,为工程结构的安全性评估、设计优化以及长期监测提
-

- 全天空成像仪——一款具有动态分析功能的云量监测仪
- TH-TK1是一款具有175°视野的全天空自动成像系统,采用清晰的语言镜头,500万/2000万像素高品质CMOS感光模组,大可输出2560×1920 30fps图像。
-

- 我国研发色散补偿装置 既保证测量精度又拓宽测量时间窗口
- 脉冲宽度和信噪比均是高能超短脉冲的核心技术指标。必须进行单次测量,传统的测量方式无法保证测量精度。
-

- 线缆测径仪深度测评:高精测量的得力助手!(下)
- 为了测试线缆测径仪的稳定性,我们让仪器连续工作了72小时,对同一根线缆进行不间断测量。在整个测试过程中,仪器的测量数据波动极小,没有出现明显的漂移或误差增大的情况。这表明该测径仪在长时间运行过程中能够
-

- 应用 | 可喷涂超疏水牙齿保护剂:具有光敏抗菌、耐酸、防污功能
- 世界卫生组织(WHO)提出了“8020”的目标,即在80岁时保留20颗功能性牙齿。由于牙齿没有任何再生功能,如何确保牙齿健康长寿成为了备受关注的问题。









①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi
最新话题
最新资讯
- 艾康全心 实验室分析检测公司 化学试剂检测 价格低
- 政策红利已至!助力全国食品安全检测机构能力升级!
- 展会预告|中国力学学会-第八届青年学术会议威科工业与您相约!
- 上海新诺仪器参加第二十二届中国国际科学仪器及实验室装备展览会
- 告客户书(一):关于美国线产品价格及货期调整
- 诚邀莅临 | 德国元素参加第二十八届青岛市分析测试学会年会
- 4月14日!倒计时开启!亚洲首家新能源电池力学实验室揭幕仪式暨新能源电池力学测试论坛将启动!
- MC镁瑞臣论文奖励丨西安工程大学:刘甜、朱炜凭借使用我们MC镁瑞臣的产品,发表了最新光解水的研究成果!
- MC镁瑞臣论文奖励丨淮北师范大学:胡成凭借使用我们MC镁瑞臣的产品,发表了最新光催化二氧化碳还原的研究成果!
- 展会邀请丨MC镁瑞臣受邀参展2025第八届华人光催化材料学术研讨会4月11-14日我们在现场邀您莅临!
作者榜










参与评论
登录后参与评论