从入门开始,机器视觉基础知识详解---徕深科技
2019-08-20400一、光源
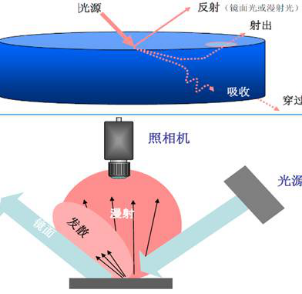
1.光路原理
照相机并不能看见物体,而是看见从物体表面反射过来的光。
镜面反射:平滑表面以对顶角反射光线
漫射反射:粗糙表面会从各个方向漫射光线
发散反射:多数表面既有纹理,又有平滑表面,会对光线进行发散反射
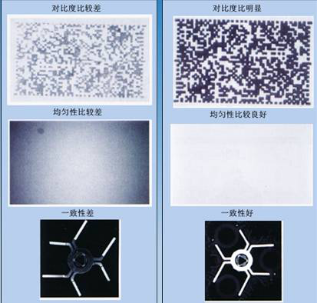
2.作用和要求
在机器视觉中的作用,照亮目标,提高亮度,形成有利于图像处理的效果,克服环境光照影响,保证图像稳定性,用作测量的工具或参照,良好的光场设计要求,对比度明显,目标与背景的边界清晰,背景尽量淡化而且均匀,不干扰图像处理
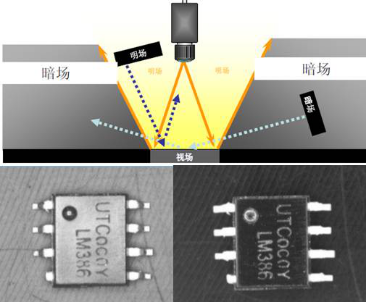
3.光场构造
明场: 光线反射进入照相机
暗场:光线反射离开照相机
4.构造光源
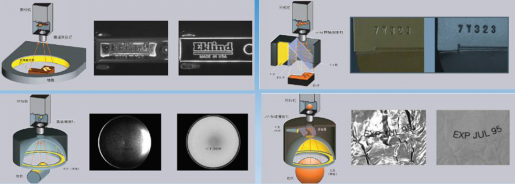
使用不同照明技术对被测目标会产生不同的影响,以滚珠轴承为例:

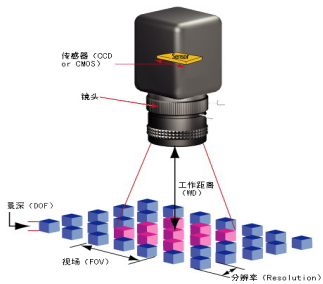
二、相机
种类:线&面、隔/逐、黑/彩、数/模、低/高、CCD/CMOS
指标:象元尺寸、分辨率、靶面大小、感应曲线、动态范围、灵敏度、速度噪声、填充因子、体积、质量、工作环境等
工作模式:Free run、Trigger(多种)、长时间曝光等
传输方式:GIGE,Cameralinker,模拟
1.按照图像传感器区分
CCD相机:使用CCD感光芯片为图像传感器的相机,集光电转换及电荷存贮、电荷转移、信号读取于一体,是典型的固体成像器件。
CMOS相机:使用CMOS感光芯片为图像传感器的相机 ,将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上,还具有局部像素的编程随机访问的优点。
2.按照输出图像颜色区分
单色相机:输出图像为单色图像的相机。
彩色相机:输出图像为彩色图像的相机。
3.按输出信号区分
模拟信号相机:从传感器中传出的信号,被转换成模拟电压信号,即普通视频信号后再传到图像采集卡中。
数字信号相机:信号自传感器中的像素输出后,在相机内部直接数字化并输出。数字相机又包含1394相机、USB相机、Gige相机、CameraLink相机等
4.按照传感器类型区分
面扫描相机:传感器上像素呈面状分布的相机,其所成图像为二维“面”图像。
线扫描相机:传感器上呈线状(一行或三行)分布的相机,其所成图像为一维“线”图像。
5.CMOS VS CCD
| CCD | CMOS |
| 串行处理 | 并行处理 |
| 光线灵敏度高,图像对比度高 | 光线灵敏度低,图像对比度低,高动态范围 |
| 低噪声 | 存在固定模式噪音 |
| 集成度较低 | 高集成度,芯片上集成了很多功能 |
| 取图速度慢,帧率低 | 取图速度块,帧率高 |
| 功耗一般 | 功耗较低 |
| 成本较高 | 成本低 |
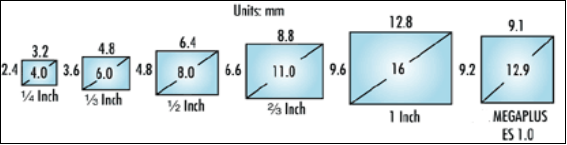
6.传感器的尺寸
图像传感器感光区域的面积大小。这个尺寸直接决定了整个系统的物理放大率。如:1/3“、1/2”等。绝大多数模拟相机的传感器的长宽比例是4:3 (H:V),数字相机的长宽比例则包括多种:1:1,4:3,3:2 等。
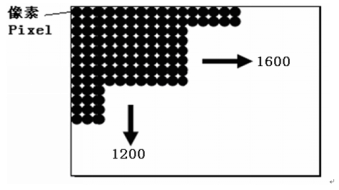
7.像素
是成像于相机芯片的图像的Z小组成单位。以200万像素的相机为例,满屏有1600*1200个像素,成像于1/1.8英寸大小的CCD芯片。
8.分辨率
由相机所采用的芯片分辨率决定,是芯片靶面排列的像元数量。通常面阵相机的分辨率用水平和垂直分辨率两个数字表示,如:1920(H)x 1080(V),前面的数字表示每行的像元数量,即共有1920个像元,后面的数字表示像元的行数,即1080行。
9.帧率和行频
由相机的帧率/行频表示相机采集图像的频率,通常面阵相机用帧率表示,单位fps(Frame Per second),如30fps,表示相机在1秒钟内Z多能采集30帧图像;线性相机通常用行频表示,单位KHz,如12KHz表示相机在1秒钟内Z多能采集12000行图像数据。
10.快门速度
CCD/CMOS相机多数采用电子快门,通过电信号脉冲的宽度来控制传感器的光积分(曝光)时间。对于一般性能的的相机快门速度可以达到1/10000-1/100000秒。
卷帘快门(Rol领 Shutter):多数CMOS图像传感器上使用的快门,其特征是逐行曝光,每一行的曝光时间不一致。
全局快门(Global Shutter):CCD传感器和极少数CMOS传感器采用的快门,传感器上所有像素同时刻曝光。
11.智能相机
智能工业相机是一种高度集成化的微小型机器视觉系统。它将图像的采集、处理与通信功能集成于单一相机内,从而提供了具有多功能、模块化、高可靠性、易于实现的机器视觉解决方案。智能工业相机一般由图像采集单元、图像处理单元、图像处理软件、网络通信装置等构成。由于应用了Zxin的 DSP、FPGA及大容量存储技术,其智能化程度不断提高,可满足多种机器视觉的应用需求。
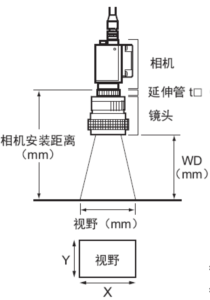
三、镜头
1.主要参数
工业的镜头大都是多组镜片组合在一起的。计算时会忽略厚度对透镜的影响将其等效成没有厚度的播透镜模型,即理想凸透镜。
参数:焦距/视场/物距/像距/光圈/景深/分辨力/放大倍数/畸变/接口
分辨率:对色彩和纹理的分辨能力。
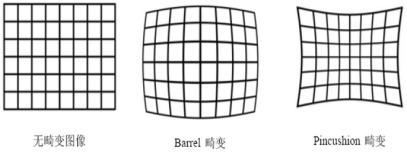
畸变:镜头ZX区域和四周区域的放大倍数不相同。
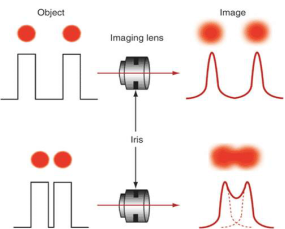
畸变的校正一般用黑白分明的方格图像来进行,过程并不复杂。一般如果畸变小于2%,人眼观察不到;若畸变小于CCD的一个像素,摄像机也看不见。
2.分类
CCTV镜头、专业摄影镜头、远心镜头


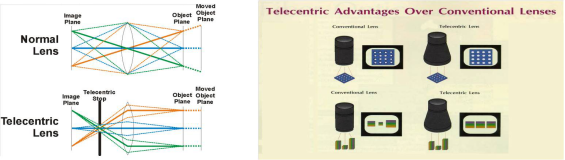
4.远心镜头
在测量系统中,物距常发生变化,从而使像高发生变化,所以测得的物体尺寸也发生变化,即产生了测量误差;即使物距是固定的,也会因为CCD敏感表面不易极ng确调整在像平面上,同样也会产生测量误差。采用远心物镜中的像方远心物镜可以消除物距变化带来的测量误差,而物方远心物镜则可以消除CCD位置不准带来的测量误差。
相关产品
-
- 重庆机器视觉系统VDSR视觉传感器 徕深科技
- 品牌:重庆徕深
- 型号:VDSR

-
- 重庆机器视觉系统-VD230机器人3D视觉引导系统
- 品牌:重庆徕深
- 型号:VD230

