微流控注射泵无脉动的关键是分辨率
在我们的#CETONIacademy部分中,我们将开始定期讨论微流体的基础知识。该系列以“无脉动”一词开头,因为在微流体中,没有什么比恒定的流体流动更重要的了。
那么,什么是“无脉动”?
微流体领域的特点是应用涉及在同样小的腔体中的极少量流体。许多应用(例如在流动化学中发现的应用)需要稳定,无脉动的流体流动,以确保即使在很短的时间间隔内也能保持连续的混合比。在生物化学应用中分隔流的创建和操纵也需要这种流体流动的一致性。
在微流体中,术语“脉动”表示实际流量的振荡,否则其平均值可能是正确的。在微流体应用中经常出现的极小流速下(相对而言),脉动可能很强,并对小规模过程产生负面影响。即使机械组件无法提供完全无脉动的性能,也可以将脉动减小到不再能被现有的测量设备检测到的程度,或者不再对当前的实验应用过程产生影响。这种状态称为“无脉动”。
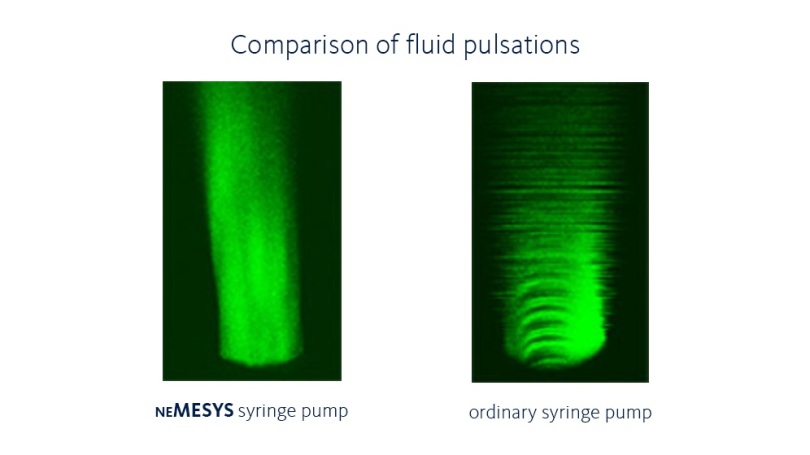
Pulsation characteristics (dosing of a fluid stream of 5μl/s with fluorescent colouring)
pictures Friedrich-Schiller-University Jena
拐弯处开车-闭上眼睛
注射泵允许使用自定义尺寸的活塞以一定速度移动并通过位移来进行流体的体积传输。为了用注射泵产生恒定的流量,活塞的横向运动必须保持极其一致。在这方面,通常常规的注射泵是很难实现的,因为其驱动部分的分辨率受到限制。反过来,这也导致脉动的产生。但是,泵的测量元件(编码器)的分辨率确是至关重要的。
活塞的横向运动必须由受控的驱动系统产生。通常,电动机的旋转通过主轴驱动器转换成线性运动。位置控制器以固定的小间隔检查实际位置或电动机的旋转角度,并将其与各自的目标位置进行比较。实际值与目标值之间的偏差决定了电机所需的控制量,这种偏差取决于操纵电机的电流。分辨率低的位置传感器会导致更长的测量间隔,特别是在速度较慢的情况下。因此,控制器以相对较长的间隔接收有关活塞的实际位置的信息,这会使控制校正变得复杂,并导致速度波动。
以下示例将使这一点更加清楚。 想象一下一个控制电路,该电路规定汽车驾驶员必须行驶一定距离,但是每两秒钟只能睁开眼睛以检查其位置并进行路线校正。 如果实验以20 km / h的速度在直线轨道上进行,那么它将很好地进行。 但是,如果驾驶员必须转弯,则成功的可能性就会大大降低。 车辆的路径可能类似于多边形的形状,而不是曲线的形状,因为当睁开眼睛时,驾驶员将被迫对其位置进行强有力的校正以保持在正轨上。
Z高分辨率–Z高质量
注射器驱动器中的低采样率会导致恒定的校正,这是通过增加或降低电动机电流来实现的。 这会阻止平滑且平稳的运行并导致脉动。
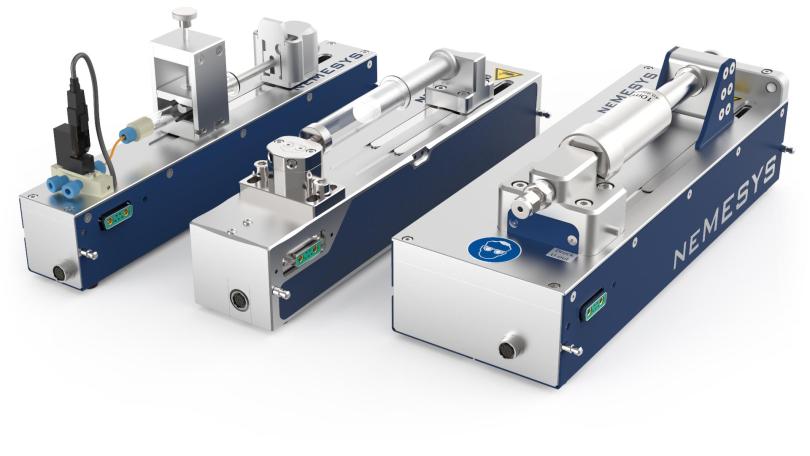
因此,CETONI使用Z高质量的组件,并将其注射泵与分辨率在亚微米范围内的驱动器配合使用。 结果,我们驱动器的脉动是如此微小,以至于在当今的微流体应用中微不足道。 因此,neMESYS注射泵适合具有Z高极ng确度要求的微流体应用。
相关产品





全部评论(0条)
推荐阅读
-

- 显微镜应用于微流控
- 微流控是一种以在微纳米尺度空间中对流体进行操控为主要特征的科学技术。在观察微流控时,常用的显微镜包括倒置显微镜和正置显微镜。
-

- 微流控蛋白结构分析仪
- 特别是在蛋白质研究领域,微流控蛋白结构分析仪的出现为蛋白质的高效分析和精确结构解析提供了前所未有的技术支持。本文将详细探讨微流控蛋白结构分析仪的工作原理、应用领域以及它在生物学研究中的重要性。
-

- 基因芯片分类 微流控
- 基因芯片是一种能够高效检测基因表达、基因突变以及多种生物标志物的技术,而微流控技术则通过在微小尺度的通道中操控流体,实现高效、精确的分析和实验操作。本文将深入探讨基因芯片的分类,以及微流控技术在基因芯片中的应用,分析它们如何在疾病诊断、个性化医疗和基础研究中发挥重要作用。
-
- Elveflow微流控产品介绍
- Elveflow微流控产品介绍





①本文由仪器网入驻的作者或注册的会员撰写并发布,观点仅代表作者本人,不代表仪器网立场。若内容侵犯到您的合法权益,请及时告诉,我们立即通知作者,并马上删除。
②凡本网注明"来源:仪器网"的所有作品,版权均属于仪器网,转载时须经本网同意,并请注明仪器网(www.yiqi.com)。
③本网转载并注明来源的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品来源,并自负版权等法律责任。
④若本站内容侵犯到您的合法权益,请及时告诉,我们马上修改或删除。邮箱:hezou_yiqi









参与评论
登录后参与评论