仪器视频
来源:
泰初科技(天津)有限公司时间:
2019-11-20类型:
仪器应用查看:
665软性机器人技术是一个不断发展的领域,它依赖于模仿自然界中存在的软体的运动机制来实现平稳复杂的运动。在复杂环境中可以移动的“软体”中,蚯蚓,蛇,幼虫,章鱼和鳗鱼呈现了多种不同的策略,我们从这些策略中汲取了很多灵感。
软性机器人主要由易于变形的物质例如流体,凝胶和弹性体组成,其能够与环境材料相匹配。顺应性匹配的原则是指相互接触的材料应具有相似的机械刚度,以便均匀地分布内部载荷并最小化降低界面应力集中。但是,该原理不适用于刚性机器人(E = 10^9 Pa)与软质材料(E = 10^2-10^6 Pa)相互作用,从而导致损坏或机械固定(其中E是杨氏模量,它可以衡量固体材料的刚度)。这些与软质材料的相互作用被广泛传播,例如与天然皮肤,肌肉组织,脆弱的内部器官,还有生物,生物功能的人工复制等……由于机械顺应性的这种显着失配,很容易得出一个结论是:刚性机器人不适合人类亲密互动,甚至会造成危险。因此,需要一种与自然界中存在的材料和生物的弹性及流变特性相匹配的机器人,而这正是软性机器人可以提供解决方案的地方。
设计软性机器人需要在机械,电源和控制方面采用全新的模型。但是,重新思考材料,设计策略和制造技术应该会在许多领域如医疗保健,人类援助,领域探索等中以宏观和微观尺度开辟软性机器人技术的新领域。
软性机器人当前有几种致动模式如燃烧驱动致动、光敏致动和气动网络致动。其中,气动网络致动模式目前大多数软性机器人采用的驱动模式。
气动网络致动(Pneumatic Networks actuators, PneuNets)是最常见的软性机器人驱动模式,驱动器由软材料,弹性体组成,在其中加压流体可以在一系列通道和腔室内流动。 当这些腔室受压时,受限的流体会从材料内部产生应力,导致材料产生应变,变形,并使致动器运动。 通过调节嵌入式腔室的几何形状及其壁的材料属性,人们可以控制此运动的性质。 通常,流体弹性体机器人的每个部分都会弯曲,而这种弯曲是由于材料应变引起的。
如果机器人由单个均质的弹性体组成,则大多数膨胀将发生在最薄的结构上,因此机器人的运动将取决于微流体回路的几何形状。 但是,具有不同弹性行为的材料也可以用于对致动器行为的进一步控制。
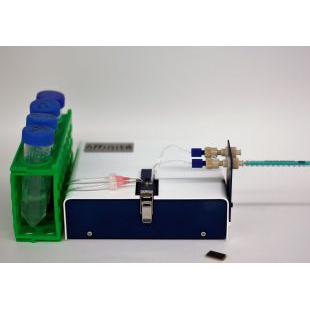
本文视频介绍了利用基于压电技术的高精密微流体压力&真空控制器OB1 MK3+控制软性机器人运动的案例。