仪器社区
焊接机器人主要包括机器人和焊接设备两部分,机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。
采用机器人进行焊接,光有一台机器人是不够的,还必须配备外围设备。常规的弧焊机器人系统由以5部分组成。
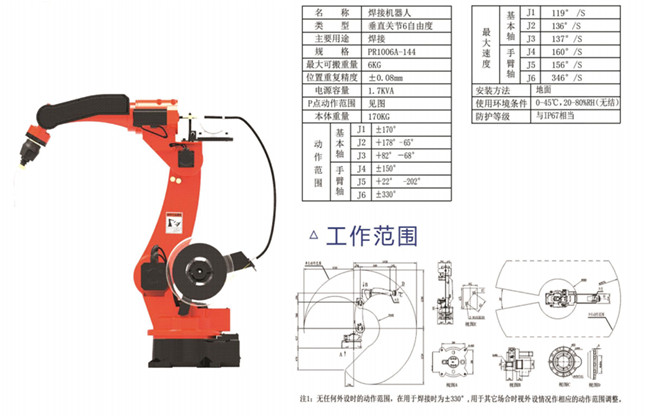
1.机器人本体,一般是伺服电机驱动的6轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。
2.机器人控制柜,它是机器人系统的神经,包括计算机硬件、软件和一些专用电路,负责处理机器人工作过程中的全部信息和控制其全部动作。
3.焊接电源系统,包括焊接电源、专用焊枪等。
4.焊接传感器及系统安全保护设施。
5.焊接工装夹具。
随着电子技术、计算机技术、数控及机器人技术的发展,自动焊接机器人, 从60年代开始用于生产以来,其技术已日益成熟,在各行各业已得到了广泛的应用,主要有以下优点:
1.稳定和提高焊接质量,能将焊接质量以数值的形式反映出来;
2.提高劳动生产率;
3.改善工人劳动强度,可在有害环境下工作;
4.降低了对工人操作技术的要求;
5.缩短了产品改型换代的准备周期,减少相应的设备投资。

 评论
评论
