找仪器



企业性质生产商
入驻年限第3年
水下清洁机器人、船底清洗机器人、海蛎子清洗机器人
机器人部分 | |
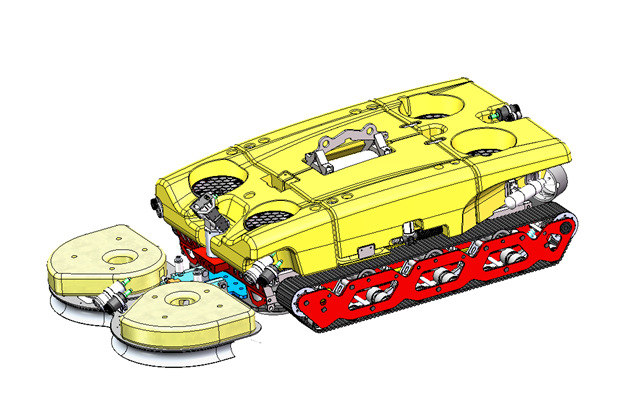
机器人尺寸重量 | 1800(长)*1200(宽)*700mm(高),550kg。 |
材料结构 | 采用框架结构,框架采用316不锈钢。 |
推进器 | 四个垂直推进器,两个水平推进器。实现翻滚、升降、吸附、前进、后退、左右转向。 |
行走履带 | 两条后驱履带,实现清理过程中的前进、后退,原地360°调头。 |
相机参数 | 云台搭载一组200W高清数字镜头,云台水平旋转角度±90°,垂直旋转角度±60°,前端搭载两组200W高清数字镜头,后端搭载两组200W高清数字镜头。 |
照明 | 云台搭载2组50W高亮LED照明灯,前端搭载两组50W高亮LED照明灯,后端搭载两组50W高亮LED照明灯,灯光亮度可调。 |
清洗机构 | 搭载4组空化清洗盘,工作压力20Mpa,流量70L/min(可定制),清理效率260㎡/h-1000㎡/h(可定制)。 |
电缆及缆车 | 长度:100m 浮力:中性 可承受拉力:不小于1000kg 缆车:滑环卷线盘。 |
深度等级 | 100m |
水下行走速度 | 0-30m/min,无极调速。 |
传感器 | 搭载电子罗经、陀螺仪、加速度计、深度传感器、温度传感器、湿度传感器、漏水检测。 |
水上控制 | |
电脑主机 | 电脑采用嵌入式主机,I7处理器,硬盘容量1T。 |
视频叠加 | 有视频叠加功能,可叠加日期时间,深度,温度、航向、泄漏指示器等。 |
电压功耗 | 电压/功耗:交流380V 40KW |
控制台 | 采用防溅控制台设计。 |
扩展性 | 留有扩展口,可扩展水下成像声呐、水下超短基线等。 |
作业流程
在岸边或者船上将机器人系统的通电及通信线缆与控制箱及供电缆车接通,然后通过绞车将机器人投放到作业区域。开启视频观测设备,观察确认水下情况后通过水平推进器行驶到目标位置。观测确认情况后开启垂直推进器,将机器人翻转并吸附在船底,开启履带行走机构,空化射流清洗机构,机器人通过软件控制实现行走与清理的配合动作,完成整个船底的清洁工作。

