定位系统(GPS)被成功用于水电大坝和大型建筑物的长期变形监测,目前,广泛采用的差分定位系统(DGPS)提高了测量精度,使GPS 的应用范围更加广泛。本文通过美国Libby 大坝变形监测实例介绍,例证了3D Tracker 系统用于监测Libby坝顶水平和垂直位移的准确性,
摘要:定位系统(GPS)被成功用于水电大坝和大型建筑物的长期变形监测,目前,广泛采用的差分定位系统(DGPS)提高了测量精度,使GPS 的应用范围更加广泛。本文通过美国Libby 大坝变形监测实例介绍,例证了3D Tracker 系统用于监测Libby坝顶水平和垂直位移的准确性,且DGPS24 小时时段垂直测量精度在1mm 范围以内。
关键词:3D Tracker 定位系统 变形监测
1 引言 对水电设施的管理机构和操作人员来说,监测大坝变形和坝身沉降是他们的主要任务。及时地发现大坝由于自然事故或大型建筑物引发的变形,就能够挽救生命,减少经济损失,避免严重的环境破坏。但是,如果大坝及其设施位于偏远的地区,实时监测大坝的变形就比较困难,再加上在偏远的、陡峭的和有滑坡的地方常规的监测仪器和设备很难布置和维护,远程布设通讯电缆也很困难,所以大多数情况很难得到实时的监测数据。本文提到的3D Tracker 系统将GPS 技术和专业的连续方位数据处理技术结合起来用于水电工程的大坝变形监测,这一技术提供了毫米精度的实时大坝及其他建筑物的连续变形监测数据,比普通的监测系统有很大的优越性。
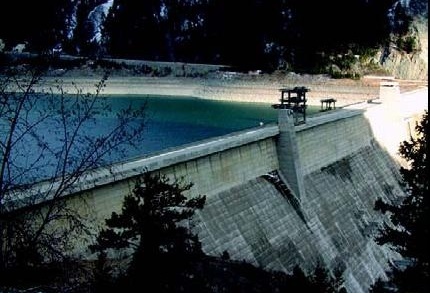
2 工程背景 Libby 水电大坝是一座混凝土重力坝,位于蒙大拿州库特奈河上游,距离Libby 约17 英里,Libby 发电能力为525 兆瓦,由美国陆程师协会于1961 年建设,是美国陆程师协会在哥伦比亚流域大坝管理网中的一部分。Libby 坝长880 米,坝高128.6米,设计库存量715,000 公顷。见图1 所示。
美国陆程师协会于1977 年在Libby大坝安装了一套激光准线系统进行变形监测,每年的5 和10 月测量一次。上世纪90 年代,这套激光系统很难维护,经过专家的论证和评估采用3D Tracker DGPS 系统。
图1 Libby 水电站大坝
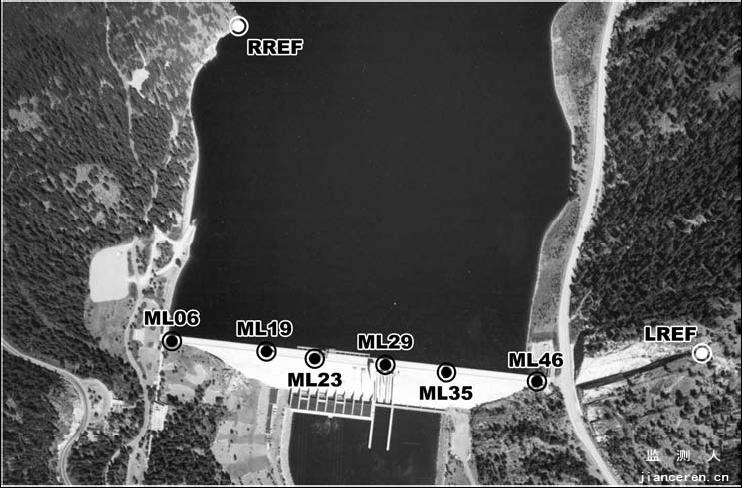
3 现场3D Tracker DGPS 系统安装 美国陆程师协会和Condor 公司于2002 年2 月在Libby 水电大坝上安装了一套3DTracker 实时GPS 监测系统,这个监测系统包括布置在大坝坝顶的混凝土桩上的六个测点和两个GPS 基准点构成,其中4 个GPS 安装在原来大坝中已有的垂线坐标仪旁,和垂线坐标仪的数据作比较。一个GPS 基准点位于大坝左肩的山顶上,另一个位于大坝右肩上游与坝顶海拔基本相同的一块隆起的岩石上。如图1 所示。
图2 3DTracker 系统测点布置图
这样操作人员能够很容易地给大坝上的每个测点分别建立两条独立的基线,同时也能通过解算两基准点间的基线完整地观测基准点。基线的长度从一百米到一公里不等。实时数据可以在位于Libby 大坝的仪器室直接处理,也可以通过局域网传输给西雅图的美国陆程师协会办公室。在天空能见度比较高时,GPS 实时观测得到的数据水平观测和垂直观测的精度大约为2mm~4mm,24 小时时段观测精度能达到1mm~2mm,这都是容许的误差范围。工程师协会的工程师们将这些数据与通过其它技术(包括铅垂线和裂缝计)观测得到的数据相比较,DY年的观测结果显示GPS 和铅垂线数据吻合得都非常好。运用这两个GPS基准点,能对大坝上的每个测点使用两套独立的方法计算。因为GPS 的精度是JD的,所以这两个独立的测量结果能不断地与系统标准精度比照,从而提供完整的观测。长期观测比照是由相关变形组成的。大坝上每个测点的两个独立过程之间的极小的误差增强了人们对测点测量精度的信心。两个独立方案之间的差别能提醒操作人员注意,并找出有偏差方案的成因。在Libby 大坝,两个基准点的计算成果在GPS 允许的误差范围内彼此吻合得非常好。为了确保长期观测的精度,GPS 监测系统必须有稳定参照标石和为每个GPS 基准点观测连续坐标的方法。如果所观测的建筑物有可能发生的位移,基准点的精确测量结果必须能够正确诊断其是否真正发生,消除它传播错误信息的可能。对于GPS 系统的表现可以从三个全面的指标来评价,分别是:系统错误分析、重复数据分析和计算结果精度分析。Libby 大坝都已明确这三个指标,这使陆程师协会的操作人员监测大坝位移的精度达到几个毫米。
4 监测数据分析 4.1 GPS 与垂线测量数据分析 图3 到图5 显示测点ML35 的DGPS 和垂线仪观测数据,曲线正值表示大坝向上游变形;负值表示大坝向下游变形。图中显示的是3 年的观测数据,从这些图中可以明显得到DGPS 和垂线仪观测数据非常接近。
从图3 到图5 我们可以注意到ML35 的DGPS 和垂线仪观测数据之间明显有偏差,这主要是两个系统安装时间不同,因而得到不同的初始数据。
图3 和图4 显示ML35 测点垂线和DGPS(LREF)坝体变形数据对比图,垂线观测数据显示为黑色,DGPS 数据显示为灰色。垂线仪每天自动读取一次数据,而DGPS 每5 秒计算一次变形数据,所有5 秒钟的DGPS 观测数据24 小时平均值见图3 的细灰线,7 天的平均值用粗灰线显示。

图3 ML35 测点垂线和DGPS(LREF)变形数据对比图
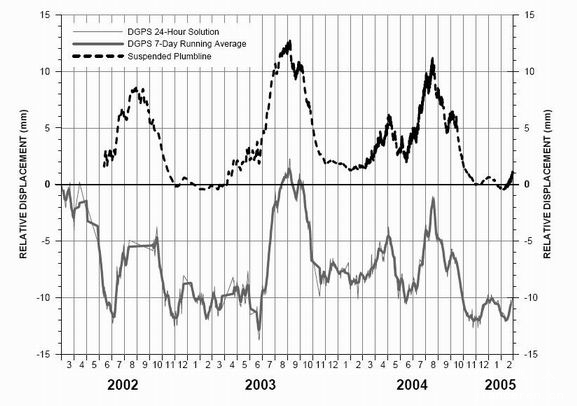
图4 ML35 测点垂线和DGPS(RREF)变形数据对比图
图5 显示LREF 和RREF 参考站以及垂线仪变形数据,从图中我们得出两个独立GPS参考站DGPS 数据完全一致,所以我们建议,在没有安装垂线仪的情况下,DGPS 网络需要布设至少两个GPS 参考站。

图5 ML35 测点垂线、DGPS(LREF)和DGPS(RREF)变形数据对比图
图6 显示的是两个DGPS 参考站之间的相对变形,从图中我们可以得知DGPS(LREF)和DGPS(RREF)之间在3 年内变形很小,这和该地区的地质情况有关,说明该地区地层很稳定。

图6 ML35 测点DGPS(RREF)和DGPS(RREF)之间相对变形数据
以上的曲线图仅仅显示ML35 监测点的平面变形情况,图7 显示的是ML35 点的垂直变形情况,灰色代表LREF 参考站DGPS 数据,黑色代表RREF 参考站DGPS 数据。图中没有垂线仪数据,因为垂线仪只能监测平面上的变形,在Libby 大坝上安装了DGPS 网络标志了垂直沉降观测开始,通过这些数据揭示大坝坝顶每年的沉降情况。

图7 ML35 测点DGPS(LREF)和DGPS(RREF)垂直变形数据对比图
4.2 DGPS 可靠性和精度分析
表 1. DGPS 观测的长期可靠度(RREF 参考站)
| | Axis | Mean of 17280 daily SDs (millimeters) | SD of daily SDs (millimeters) | 95% Confidence (1.97 x SD) (millimeters) |
| LREF-RREF | Upstream/Downstream | 0.31 | 0.18 | 0.61 |
| | Right/Left | 0.37 | 0.21 | 0.73 |
| | Vertical | 0.38 | 0.22 | 0.74 |
| RREF-ML06 | Upstream/Downstream | 0.32 | 0.18 | 0.62 |
| | Right/Left | 0.28 | 0.17 | 0.55 |
| | Vertical | 0.32 | 0.17 | 0.63 |
| RREF-ML19 | Upstream/Downstream | 0.28 | 0.20 | 0.54 |
| | Right/Left | 0.29 | 0.21 | 0.58 |
| | Vertical | 0.27 | 0.19 | 0.54 |
| RREF-ML23 | Upstream/Downstream | 0.30 | 0.14 | 0.59 |
| | Right/Left | 0.30 | 0.14 | 0.59 |
| | Vertical | 0.25 | 0.13 | 0.50 |
| RREF-ML29 | Upstream/Downstream | 0.28 | 0.16 | 0.56 |
| | Right/Left | 0.26 | 0.14 | 0.51 |
| | Vertical | 0.25 | 0.15 | 0.48 |
| RREF-ML35 | Upstream/Downstream | 0.33 | 0.17 | 0.64 |
| | Right/Left | 0.28 | 0.14 | 0.55 |
| | Vertical | 0.28 | 0.14 | 0.56 |
| RREF-ML46 | Upstream/Downstream | 0.25 | 0.25 | 0.49 |
| | Right/Left | 0.27 | 0.23 | 0.52 |
| | Vertical | 0.25 | 0.17 | 0.49 |
| Average | Upstream/Downstream | 0.29 | 0.18 | 0.58 |
| | Right/Left | 0.29 | 0.18 | 0.57 |
| | Vertical | 0.29 | 0.17 | 0.56 |
| | Overall Average | 0.29 | 0.18 | 0.57 |
表 2. DGPS 观测的长期可靠度(LREF 参考站)
| | Axis | Mean of 17280 daily SDs (millimeters) | SD of daily SDs (millimeters) | 95% Confidence (1.97 x SD) (millimeters) |
| LREF-ML06 | Upstream/Downstream | 2.06 | 0.64 | 4.07 |
| | Right/Left | 2.73 | 0.82 | 5.39 |
| | Vertical | 2.30 | 0.85 | 4.53 |
| LREF-ML19 | Upstream/Downstream | 2.02 | 0.67 | 3.97 |
| | Right/Left | 2.44 | 0.86 | 4.80 |
| | Vertical | 2.25 | 0.91 | 4.43 |
| LREF-ML23 | Upstream/Downstream | 2.30 | 0.50 | 4.53 |
| | Right/Left | 2.13 | 0.72 | 4.21 |
| | Vertical | 2.22 | 0.78 | 4.37 |
| LREF-ML29 | Upstream/Downstream | 1.69 | 0.58 | 3.33 |
| | Right/Left | 2.29 | 0.60 | 4.51 |
| | Vertical | 2.18 | 0.91 | 4.30 |
| LREF-ML35 | Upstream/Downstream | 2.07 | 0.48 | 4.08 |
| | Right/Left | 2.07 | 0.55 | 4.07 |
| | Vertical | 2.06 | 0.74 | 4.06 |
| LREF-ML46 | Upstream/Downstream | 1.38 | 0.42 | 2.71 |
| | Right/Left | 1.93 | 0.62 | 3.79 |
| | Vertical | 1.92 | 0.72 | 3.78 |
| Average | Upstream/Downstream | 1.92 | 0.55 | 3.78 |
| | Right/Left | 2.26 | 0.69 | 4.46 |
| | Vertical | 2.16 | 0.82 | 4.25 |
| | Overall Average | 2.11 | 0.69 | 4.16 |
表 3. DGPS 精度(ML35)
| | Axis | Axis Mean of Day-to-Day deltas (millimeters) | DGPS Accuracy of Day-to-Day deltas (millimeters) | 95% Confidence (1.97 x SD) (millimeters) |
| LREF-ML35 | Upstream/Downstream | -0.09 | 0.90 | 1.77 |
| RREF-ML35 | Upstream/Downstream | -0.03 | 0.48 | 0.95 |
5 总结 5.1、在Libby 大坝安装的3D Tracker 系统的6 个GPS 中有4 个安装在原来在大坝中存在的垂线坐标仪旁,和垂线坐标仪的结果作比较。GPS 和垂线坐标仪的配置不仅可以比较两种测量系统的结果,而且可以使GPS 系统为垂线坐标仪系统提供安全监测。从文中图表显示,在Libby 大坝顶部的水平位移测量中,GPS 和垂线坐标仪的测量结果具有很好的一致性。
5.2、在Libby 大坝布置两个GPS 参考站,来提高测量系统的精度和准确度,两个参考站使得系统对每一个遥测站点在任何时间都具有两个独立运行的解决方案。通过实时的监测计算测量站的结果相对于两个独立参考站间数据的一致性,可以立即显示整个系统的精度和准确度。在峡谷的相反的边坡上安装参考站,从每个接收站都可以进行校准程序。每个GPS 监测点相对于两个独立参考站测量数据的一致性非常好。
5.3、3D Tracker 实时GPS 监测系统将Kalman 滤波技术、三差量测技术应用到水电大坝和其他大型建筑物的变形监测,使得24 小时时段垂直测量精度在1~2 毫米。
5.4、在大坝变形监测中,垂线测量系统只能监测平面上的运动,而GPS 系统可以同时监测垂直和水平方向的运动。
◆参考文献:PERFORMANCE MONITORING OF LIBBY DAM WITH A DIFFERENTIAL GLOBAL POSITIONING SYSTEM UNITED STATES SOCIETY OF DAMS-JUNE 2005




参与评论
登录后参与评论